
|
2015年度
|
第3回 テーマ:
“ゆ〜っくり急いでっ!”
【 課題 (ゲーム要領) 】
-
図1に示す皿にピンポン玉を載せて,ライントレースで図2のスタートからゴールまで移動する時間を競う.
競技規定:
○競技全般について
- ロボットは競技開始後,変形することは認めるが,親機・子機と分裂することは不可とする.
- 競技開始までのセットアップ時間は,PICの交換,電源の接続などを含め1分以内,競技時間は最大3分とする.
- 競技終了,もしくは競技時間が終了すると動作を停止し,競技終了のシグナルを出す機構を有すること.シグナルは,5メートル離れた全方向から確認ができること.競技終了のシグナルが無い場合は失格とする.
- 制御プログラムは,アセンブリ言語で作成すること.
- 競技場の仕様は図6.2の形状・寸法とする.図の寸法はいずれも公称値であり,公差を±3%とする.(図面より実寸法が優先する.)
○走行方法,皿について
- 走行形態はライントレースに限る.
- スタート方向は,右回り,左回りどちらでもよい.
- 競技終了時の停止位置は,ロボット重心がゴールライン上とする.
- 走行用の駆動系は左右非対称とし,左右で異なる仕様のアクチュエータを用いること.
- 皿の仕様は図6.1とし,各班で作製する.
- 皿に載せることができるのはピンポン玉のみとし,ピンポン玉の数は自由.
- 皿の上面やピンポン玉を加工したり,粘着性を持たせることは禁止.
- 皿は下面から支えることとし,ピンポン玉の落下を妨げる構造物の設置は禁止.
- ゴール合図時に皿の上にピンポン玉がない場合,所要時間が3分を超える場合は失格(0点)とする.
- 競技得点 = ( 1024/2(落下したピンポン玉の数))×(1+| (搭載したピンポン玉の数)2-81| )/(所要時間(分)) 点
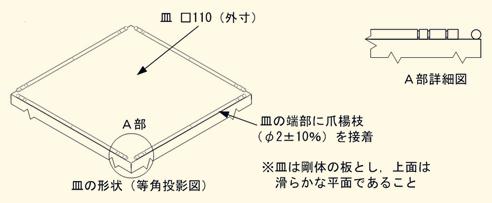
皿の慨観
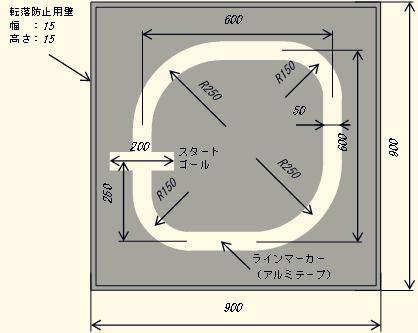
競技場の慨観
2015年度・年間スケジュール
| 日 付 |
行 事 |
|
(2月20日) |
(希望分野アンケート調査)
|
|
4月10日 |
ガイダンス |
|
5月18日 |
企画書提出
|
| 7月03日 |
中間発表会
|
| 10月02日 |
ロボット提出
|
| 10月05日 |
基本計画書提出
|
| 10月23日 |
プレ・ロボット競技会
|
| 11月7,8日 |
ロボット競技会(学生祭)
|
| 11月20日 |
ロボット性能試験会
写真撮影
|
|
1月22日 |
最終発表会
|
|
2月01日 |
設計書提出 |
| 2月04日 |
ロボット解体
リサイクル |